円柱座標変換(えんちゅうざひょうへんかん)とは、3次元ユークリッド空間 (数ベクトル空間)の、非線形な座標変換の一つである。円柱座標変換の逆写像のことを、円柱座標系という。円柱座標系は、極座標系の一種である。
円柱座標変換は、電子レンズなど、軸対称な系の計算によく用いられる。
定義
定義
円柱座標変換Φとは、
- (1-1-1)
で表される、r -θ-ζ空間からx -y -z 空間への多変数ベクトル値関数のことである。式(1-1-1)で定義されたΦに相似変換、場合によっては正則なアフィン変換を施したものも、円柱座標変換ということがあるので、特に混乱が生じる場合には(1-1-1)で定義されたΦを標準的な円柱座標変換ということにする。
r-θ-ζ空間、x-y-z空間の正体
数学的には、r -θ-ζ空間、x -y -z 空間は、共に3次元実数ベクトル空間()である。r -θ-ζ空間においては、第一軸方向をr 方向(r 軸)、第二軸方向をθ方向(θ軸)、第三軸方向をζ方向(ζ軸)とする。x -y -z 空間においても同様に、第一軸方向をx 方向(x 軸)、第二軸方向をy 方向(y 軸)、第三軸をz 方向(z軸)とする。この三軸によって定まる座標系を、「x -y -z 空間の標準座標系」(O-xyz 系)という。
定義域
式(1-1-1)の円柱座標変換Φ はr -θ-ζ空間のすべての点において、矛盾なく定義がされている。例えば、
- (1-3-1)
のように、どのような (r, θ, ζ) に対しても、ただ一つの行き先を定めることができる。
しかし、本記事では特段の断りがない限り、Φ の定義域は式(1-3-2) に定める領域 V に制限されているものとする。V は、r -θ-ζ の部分集合であり、閉集合である(開集合ではない)。
(1-3-2)
つまり、Φ に代入されるものは、
- (1-3-3)
のすべての条件を満たす点全てに限って考えることにする。
Φ の定義域を式(1-3-2) の V に制限してもよい理由は、全射性が保たれていることによる。
円柱座標系との関係
x -y -z 空間に、標準座標系(O-xyz 系;「r -θ-ζ空間、x -y -z 空間の正体」の項参照)が定められているとする。このとき、円柱座標系P とは、
- (1-4-1)
で表される、x -y -z からr -θ-ζ空間への多変数ベクトル値関数のことである。但し、θ(x , y , z) は、以下の定義式(1-4-2)で与えられるスカラー値関数である。θ(x , y , z) の定義域はx -y -z 空間の原点以外である。その他の成分は、x -y -z 空間全域で定義されている。従って、円柱座標系P の定義域は、x -y -z 空間の原点以外である。
- (1-4-2)
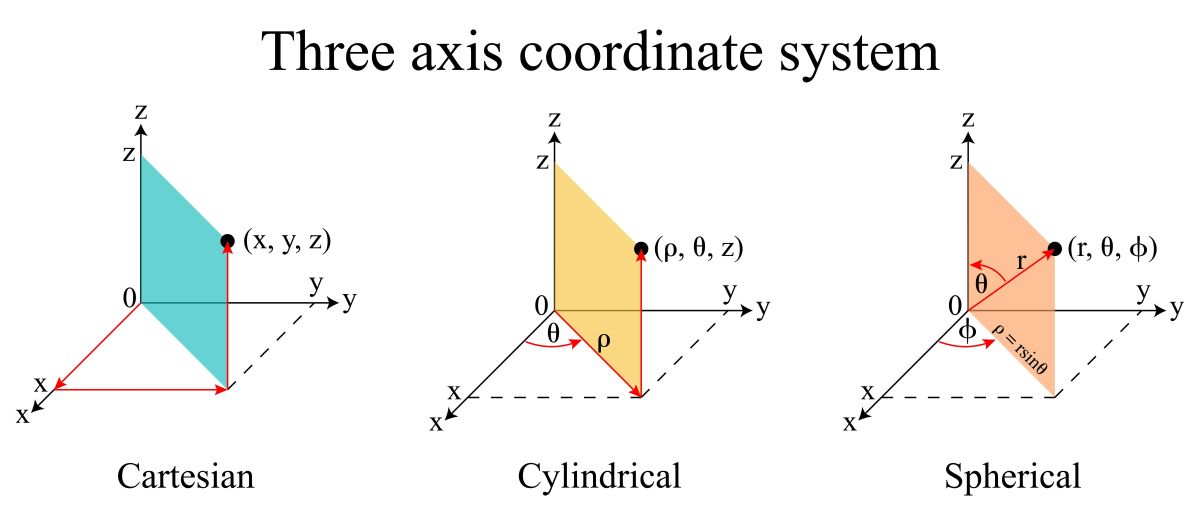
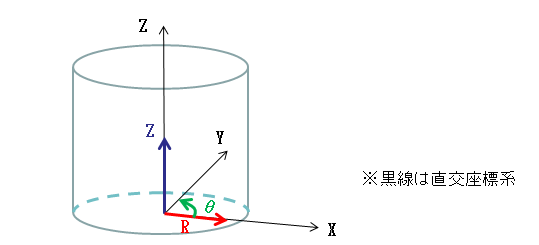
円柱座標系は、以下の手順で、幾何学的に理解することもできる。
- 任意の点Pからxy平面に下した垂線の足をQとする。
- 線分OQの長さをrとする。
- 線分QPの長さをζとする。
- x軸と線分OQのなす角度をθとする。
また、円柱座標系と円柱座標変換は、相互に逆変換となっている。
微分
微分
円柱座標変換の偏導関数は、
- (2-1-1)
- (2-1-2)
- (2-1-3)
である。これらの定義域は、r -θ-ζ空間全域である。
従って、円柱座標変換の点 (r , θ, ζ) におけるヤコビ行列J Φ(r , θ, ζ) およびヤコビアン det(J Φ(r , θ, ζ)) は以下のようになる。ヤコビ行列、ヤコビアン共に定義域はr -θ-ζ空間全域である。
- (2-1-4)
- (2-1-5)
従って、円座標のときと同じく、特異点(ヤコビアンが 0 となる点)は、r = 0 となる点全て、つまり (0, θ, ζ) の形であらわされる点全てである。これらの点は全てx -y -z 空間上ではz 軸に移る。
法線
標準的な円柱座標変換Φに対し、Nr , Nθ , Nζ を以下のように定義し、それぞれr 法線、θ法線、ζ法線と呼ぶ。これらの定義域は、r -θ-ζ空間全域である。
- (2-2-1)
- (2-2-2)
- (2-2-3)
ここで、“×”はベクトル積を意味する。これらの幾何学的な意味は、後述するが、幾何学的な意味でも、これらは法線になっている。
円柱と円柱座標
この節では、後述の説明のために記号を定義する。
円柱と円柱座標
M を、空間で半径r0 、高さz0のふたと底のある、中身のつまった円柱(以降「ソリッド円柱」と呼ぶ)とする。式で書くと
- (3-1-1)
である。さらに、「ソリッド円柱」に該当するもの全ては、このM に相似変換を加えれば集合として実現できるので、以下は、M のみについて考える。
次に、このM を、円柱座標変換Φとr -θ-ζ空間内の直方体(六面体)L を用いてパラメータ付け(パラメトライズ)することを考える。r -θ-ζ空間内の直方体L を
- (3-1-2)
と定義する。L の3辺の長さはそれぞれ、r0 , θ0 , 2πである。M は、L のΦによる像集合である。すなわち
- (3-1-3)
である。上式の等号は、集合として等しいことを意味する。
円柱表面
式(3-1-1)のソリッド円柱M の表面をと書き、円柱表面、円筒面、M の表面、あるいはM の境界面と呼ぶ。表面∂M は、以下のΔ1 , Δ2 , Δ3 に分割することができる。
- (3-2-1)
- (3-2-2)
- (3-2-3)
Δ1 , Δ2 , Δ3 をそれぞれ、下面、側面、上面という。
逆に言うと、Δ1 , Δ2 , Δ3 を貼り合わせたものが∂M である。集合演算を用いると、
- (3-2-4)
のようになる。
次に、Δ1 , Δ2 , Δ3 を、円柱座標変換を利用してパラメトライズすることを考える。D1 , D2 , D3 を以下のように定める。
- (3-2-5)
- (3-2-6)
- (3-2-7)
D1 , D2 , D3 は、それぞれr -θ平面、θ-ζ平面、r -θ平面の部分集合となっている。また、D1 とD3 は集合として全く等しいものである。
また、x -y -z 空間に値を取るベクトル値関数I1 , I2 , I3 を以下のように定義する。I1 , I2 , I3 の定義域は、本来的にはそれぞれr -θ平面、θ-ζ平面、r -θ平面であるが、ここでは、それぞれの定義域をD1 , D2 , D3 に制限して考えることにする。これらI1 , I2 , I3 を、それぞれΔ1 , Δ2 , Δ3 のパラメータと呼ぶ。
- (3-2-8)
- (3-2-9)
- (3-2-10)
Δ1 , Δ2 , Δ3 は、それぞれD1 , D2 , D3 のI1 , I2 , I3 による像集合となっている:
- (3-2-11)
ここで、“=”は集合としての等号である。例えば、Δ1 = I1(D1) とは、Δ1 とI1 (D1) が集合として等しいことを意味している。
Δ1 , Δ2 , Δ3 それぞれの法線ベクトルを、NΔ1 , NΔ2 , NΔ3と書く:
- (3-2-12)
- (3-2-13)
- (3-2-14)
NΔ1 , NΔ2 , NΔ3 の定義域は、それぞれD1 , D2 , D3 である。ここで、Nθに平行なものがないことに注意されたい。
ベクトル場
x -y -z 空間で定義されたベクトル場X をx -y -z 座標系について表示すると
- (4-1-1)
となる。これを円柱座標表示に変換することを考える。まず、スカラー値関数Xr (r , θ, ζ) , Xθ (r , θ, ζ) , Xζ (r , θ, ζ) を、
- (4-1-2)
と定義する。正確に書くと
- (4-1-3)
である。ここで、・は内積を意味する。定義式(4-1-3)から明らかなように、これらの定義域はr -θ-ζ空間全域(r = 0 となる点を含む)である。
ここで以下が成立する。””は、合成関数の意味である。
- (4-1-4)
またはこれを逆に解くと
- (4-1-5)
が分かる。
また、次の等式がr = 0 となる点を含むすべての (r , θ, ζ) に対して成立する。
- (4-1-6)
式(4-1-6)を、ベクトル場の円柱座標表示という。より正確な言い方をすると、「x -y -z 空間で定義されたベクトル場X の円柱座標表示」という。
積分
体積分
ここではx -y -z 空間で定義されたスカラー値関数f の、式(3-1-1)の円柱M 内部での積分
- (5-1-1)
の計算方法を説明する。円柱M について
- (5-1-2)
が成立することに注意すると、f の積分は以下のように累次積分に帰着されることが分かる。
- (5-1-3)
また、式(3-1-2)の直方体L に対しM = Φ(L )(式(3-1-3))であることと、ヤコビアン(式(2-1-5))に注意して、積分の変数変換公式を用いると、
- (5-1-4)
が分かる。
以上、まとめると、
- (5-1-5)
がわかる。
面積分
ここでは、ベクトル場の円柱表面∂M 上での面積分の計算方法を説明する。
x -y -z 空間で定義されたベクトル場X に対して、円柱面∂M 上の面積分を
- (5-2-1)
で定める。但し、右辺の各項は
- (5-2-2)
- (5-2-3)
- (5-2-4)
である。ここで、
- (5-2-5)
同様に、
- (5-2-6)
- (5-2-7)
なので、
- (5-2-8)
- (5-2-9)
- (5-2-10)
である。従って、
(5-2-11)
が分かる。
ガウスの発散定理
x -y -z 空間で定義されたベクトル場X に対して、
- (5-3-1)
が成立する。この事実を、円柱面におけるガウスの発散定理という。ここで、
- (5-3-2)
はベクトル場X の発散である。以下、証明を行う。
証明の準備
(5-1-5)、(5-2-2)、(5-2-3)、(5-2-4)より、
- (5-3-3)
- (5-3-4)
を示せばよいことがわかる。
x,y成分についての証明
まず、式(5-3-3)を示す。
x -y 平面上の曲線c (t ) を、
- (5-3-5)
とする。また、変数z を固定して考えることで、x -y 平面上の二次元ベクトル場
- (5-3-6)
を考える。また、平面曲線と、二次元ベクトル場に対しては、(5-3-6)に対するグリーンの定理:
- (5-3-7)
が成立することは、既知とする。
このとき
- (5-3-8)
が成り立つ。従って、
- (5-3-9)
z成分について
次に、
- (5-3-10)
を示す。
- (5-3-11)
なので、
- (5-3-12)
スカラー関数に作用する微分作用素
x-y-z空間における偏微分
f を、x -y -z 空間で定義されたスカラー値関数とする。このとき、r ≠ 0 をみたす任意の (r , θ, ζ) に対して以下の(6-1-1)~(6-1-3)の等式が成立する:
- (6-1-1)
- (6-1-2)
- (6-1-3)
上記の3式は、しばしば略記的に以下のように表記される:
- (6-1-4)
勾配作用素
勾配 grad :
- (6-2-1)
を円柱座標変換すると
...
以下、証明を行う。(grad f )(Φ(r , θ, ζ)) と、Nr (r , θ, ζ) の内積を取ると、
- (6-2-2)
であり、同様に、Nθ(r , θ, ζ) , Nζ(r , θ, ζ) についても、
- (6-2-3)
- (6-2-3)
が成り立つ。従って「ベクトル場の円柱座標表示」と同様にして、上の等式が示せる。
ラプラシアン
ラプラシアンについても、r ≠ 0 をみたす任意の(r , θ, ζ) に対して以下の等式が成立する。
- (6-2-3)
ベクトル場に作用する微分作用素
発散
X を、x -y -z 空間で定義されたベクトル場とするとき、発散 div の円柱座標系表示として以下の等式が成立する。
回転
回転 rot の円柱座標系表示については、次の等式が成立する。
ただし
である。
曲線・運動
運動
x -y -z 空間における運動を表す曲線
- (8-1-1)
が、r -θ-ζ空間に値を取る曲線
- (8-1-2)
と、円柱座標変換&Phi:を用いて、
- (8-1-3)
と表せるとき、γ(t ) を「曲線c (t ) の円柱座標表示」、あるいは「運動c (t ) の円柱座標表示」と呼ぶ。
式(8-1-3)は、
- (8-1-4)
の両辺を時刻t に関する関数と考えること、つまり、
- (8-1-5)
と考えることと同じである。
速度ベクトル
x -y -z 空間における運動を表す曲線c (t ) の速度ベクトルv(t ):
- (8-2-1)
について以下が成立する。
- (8-2-2)
但しvx , vy , vz は、それぞれv(t ) のx 成分、y 成分、z 成分を意味する。
また、
- (8-2-3)
のように定義すると、
- (8-2-4)
である。また、以下が成立する。
- (8-2-4)
加速度ベクトル
同様に曲線c (t ) の加速度ベクトルa(t ) :
- (8-3-1)
については以下が成立する。
- (8-3-2)
但しax , ay , az は、それぞれ a(t ) のx 成分、y 成分、z 成分を意味する。また、
- (8-3-2)
である。
さらに、以下が成立する。
(8-3-4)
脚注

![[matplotlib 3D] 35. 円柱(円筒座標) サボテンパイソン](https://sabopy.com/wp/wp-content/uploads/2018/11/enchu2-1.png)